|
DIY • Do it Yourself • Weekend Projects • BIG Projects • LITTLE Projects | |||||
|
DIY • Do it Yourself • Weekend Projects • BIG Projects • LITTLE Projects | |||||
How Do I Share My How-To?It's really pretty easy, pictures and videos of the steps it takes to complete your project are stored on YouTube and picasaWeb. Once your "final" video is stored on YouTube, your project will show in the listings on the site. All this is controlled by our Creator's Tools. Basically, you start a project by writing up the project idea. Step 1. Sign up for a free Creator's Account to gain access to the Creator's Tools. Step 2. Login Step 3. Push the "Create New Project" button on the Creator's Tools. Make a name (you can change it later) for your project. And describe your plans to use as notes to guide the creation of the steps. Step 4. When you've finished providing all the steps to your project, shooting the videos and saving to google video via the Creator's Tool Panel, you are ready to write the introductory paragraph with an interesting story of how you did it, or how you do it in the case of a professional services presentation. Step 5. Last but not least create and upload the video (to YouTube) which is the video that will be used to summarize the project. If you were building a robot, this final video would show the robot running around, doing fun things that will inspire others to create their version of your project. That's it... Watch the views and ratings for your project pile up along with the sales commissions! Or get a customer because you showed how you remodel a house. |
FAQ About Becoming A CreatorQ. Why would I go to all that work, building something, then put it on a website like C What I Can Do? What's the point? A. Actually, there are a couple of forms for a reward:
|
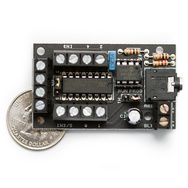
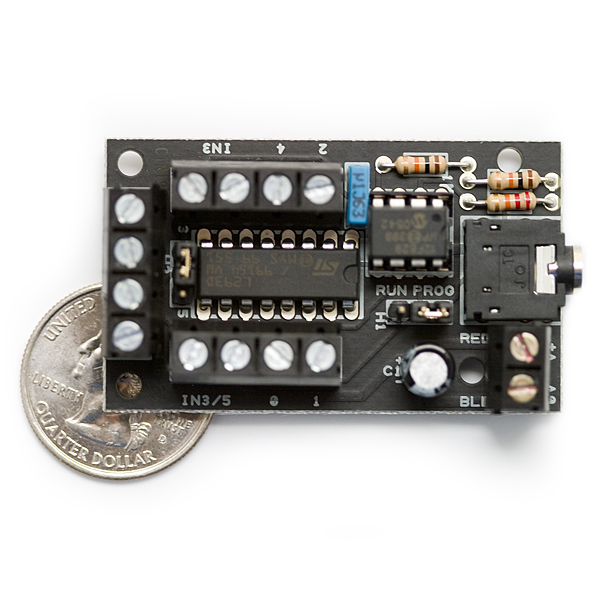
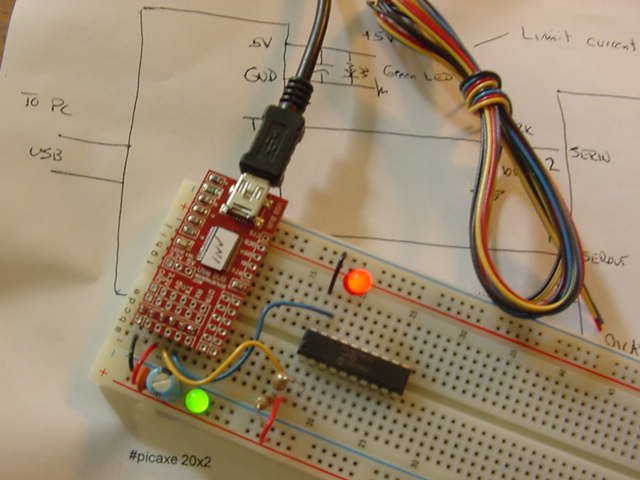
How To Build a Robot in a Box ... 32031 Views Author's name: WeRbots Low-Cost, super simple robot you can build yourself in a weekend. This robot was inspired by my original attempts to build a "dog" bot. What makes this neat is that it is simple to build AND it is expandable. Expanding is done by changing to a larger processor. I`m building another version of the little control board using the picAxe 18x just to give myself more program space to make the thing behave simply. Author's Assigned Keywords: Cheap Robot picAxe 14m picAxe 18x How To Build Cheap Bots Robots (ad) Decisions About the Build I wanted to use the continuous motion servos I found on sale at Fry`s for 10 bucks. I had read a lot about the famous (at least to me): Boe Bot, which used continuous motion servos for driving. It would run slow at top speed, but I knew this would make it work even better without worrying about stopping as soon as it sees an obstacle. I also liked the - servo head setup I used on the original Robo Dog I called dogbot which is written up somewhere else on this site. Dogbot had very "living animal" type head moves and I wanted to implement that same functionality in this little black box version of a Boe-Bot style DogBot. Software ` ------------------------------------------------------------ ` Select and initialize chipset ` ------------------------------------------------------------ #picaxe 14m ` System resources symbol serialOut = 0 `(pin 13) o0, serialOut symbol leftDrive = 1 `(pin 12) o1 symbol rightDrive = 2 `(pin 11) o2 symbol UpAndDown = 3 `(pin 10) o3 servo Vertical symbol SideToSide = 4 `(pin 9) o4 servo Horizontal symbol Piezo = 5 `(pin 8) o5 D symbol ADCin0 = 0 `(pin 7) i0 C lightSensor symbol i1 = 1 `(pin 6) i1 B symbol i2 = 2 `(pin 5) i2 A IRsensor symbol i3 = 3 `(pin 4) i3 symbol ADCin4 = 4 `(pin 3) i4 symbol srlIn = 2 `(pin 2) i5 ` (pin 1 Vdd, pin 14 = Vss) ` ------------------------------------------------------------------ ` Application dependant values ` ------------------------------------------------------------------ ` register vars symbol side2sideCnt = b0 `= w0 symbol upNdownCnt = b1 `= (w0) symbol xCount = b2 `= (w1) symbol yCount = b3 `= (w1) symbol lrRangeRight = w2 symbol lrRangeLeft = w3 symbol IRstor = w4 `= temporary IR reading symbol maxStor = w5 `= w5 symbol xStor = b12 `= w6 symbol yStor = b13 `= (w6) symbol minSideToSide = 30 `rightest symbol ctrSideToSide = 118 `center Side to Side symbol maxSideToSide = 200 `leftist symbol minUpAndDown = 100 `uppest symbol ctrUpAndDown = 140 `head at middle symbol maxUpAndDown = 155 `lowest symbol servo_delay = 40 `Delay to slow down servo motion (40ms default) symbol adc_delay = 1 `Let ADC settle (can be 1 or 0) ` ------------------------------------------------------------------ ` Application initialization ` ------------------------------------------------------------------ disablebod `make sure it works with low battery init: ` beep tune Piezo, 8,($47,$4A,$47) low Piezo `release timers on chip ` The all important "Bail Out" pause - gives you time to clear hardware memory pause 100 gosub ctrHead pause 300 gosub snoop pause 200 gosub ctrHead setint %00000001,%00000001 ` ------------------------------------------------------------------ ` Drive Around loop ` ------------------------------------------------------------------ runAround: servo leftDrive, 140 servo rightDrive,80 pause 500 goto runAround interrupt: gosub drive_stop_all ` beep tune Piezo, 6,($4A,$4A,$4A) low Piezo `release timers on chip gosub ctrHead servo leftDrive, 140 `move fwd servo rightDrive,80 pause 200 ` fwd only a smidgeon to find a way out gosub drive_stop_all gosub snoop setint %00000001,%00000001 return snoop: maxStor = 0 xStor = 118 setint %00000000,%00000000 `stop interrupts so you can do measurements for side2sideCnt = minSideToSide to maxSideToSide step 20 servo SideToSide, side2sideCnt pause 90 ` Check here for signals from sensor readadc10 ADCin0, IRstor pause adc_delay ` what is the value now in IRstor?? if maxStor < IRstor then `take a moment to: maxStor = IRstor `remember the closest object value xStor = side2sideCnt `remember the x-coordinates yStor = upNdownCnt `remember if it`s tall or short endif next side2sideCnt servo SideToSide, ctrSideToSide pause 500 if xStor < 118 then ` object right gosub turnLeft endif if xStor > 118 then ` object left gosub turnRight endif pause 400 ` turn time (tune for carpet-hard floors) return `----------------------------------------------------------------------- ` head control ` shakeHeadNo shakeHeadNo: servo SideToSide, minSideToSide pause 100 servo SideToSide, ctrSideToSide pause 100 servo SideToSide, maxSideToSide pause 100 servo SideToSide, ctrSideToSide return `----------------------------------------------------------------------- ` head control ` ctrHead ctrHead: servo SideToSide, ctrSideToSide pause 200 servo UpAndDown , ctrUpAndDown pause servo_delay pause 300 low SideToSide ` use only when you need to save current low UpAndDown return `----------------------------------------------------------------------- ` motor control ` Reverse tryReverse: servo leftDrive, 80 servo rightDrive,140 return `----------------------------------------------------------------------- ` motor control: drive_stop_all: servo leftDrive , 128 servo rightDrive , 128 pause servo_delay low leftDrive low rightDrive return `----------------------------------------------------------------------- ` turn right turnRight: `right 140, left 80 servo leftDrive, 140 servo rightDrive,140 return `----------------------------------------------------------------------- ` turn left turnLeft: `right 140, left 80 servo leftDrive, 80 servo rightDrive,80 return Robot In a Box Becomes a Pet Robot I did some experiments with giving the Black Box a Skin. While this one could be better, it gives you an idea of what you can do It's Easy To: C - What - I - Can - Do • Sign up - Get ID and Password• Plan and Create a Project That Someone Might Enjoy and May Even Want to Build• Link to your creation on your favorite social networking site or blog.• Become famous! Because your projects get a lot of Hits!
|
By Creators DoctorZoidberg: Converting a Flashlight to LED DoctorZoidberg: Home Project: MUTE TV Wearable TV Muter! DoctorZoidberg: Scare Crow - For Modern Gardens - Home Project jim: CwhatIcanDo Website jim: Tour This Website PaulSandin: Butler, a low-cost mobile robot base WeRbots: BEAM BOT: HexBug Exposed! WeRbots: Buggy Bot: Wire Frame Bot Body WeRbots: Easy Cheap Robot Weekend Project WeRbots: RFL Robot Out Of The Box Experience WeRbots: Robot Man: With Robot Demos WeRbots: Build Your Own Track Drive Robot WeRbots: Build a Robot In 5 Minutes WeRbots: i-Mon App WeRbots: How To Make A Virtual Robot in FLASH WeRbots: Droid From Motorola :: A Robot ? WeRbots: Robots Almost Anyone Can Afford WeRbots: How To Build a Robot in a Box WeRbots: picAxe 18m2 for robotics WeRbots: Build a Respectable Autonomous Robot WeRbots: On Line Neighborhood Watch WeRbots: Pong))))) WeRbots: Roboteer`s Guide to BeagleBone Black WeRbots: Autonomous Robot PVC "Pickup Truck" |
By Keywords Action Script 2: How To Make A Virtual Robot in FLASH Ajax: CwhatIcanDo Website Ajax: CwhatIcanDo Specs: RC2 Ajax: battle Android: Droid From Motorola :: A Robot ? Android: battle batting cage installation: Home Installation of a 4 Section In-Ground Batting Cage BEAM Robots: BEAM BOT: HexBug Exposed! BEAM Robots: picaxe 8m: Wall Follower Mouse gets Majorly Modded BEAM Robots: How to build simple analog balancing robots BEAM Robots: battle Block Watch Cam: On Line Neighborhood Watch Cheap Robot: Easy Cheap Robot Weekend Project Cheap Robot: How To Build a Robot in a Box Cheap Robot: Autonomous Robot Built From Power Chair Wheelchair commercial killer: Home Project: MUTE TV Wearable TV Muter! Convert Your Flashlight to LED: Converting a Flashlight to LED Create a Project: HELP :: How To Create a Project CwhatIcanDo HELP: HELP :: How To Create a Project Do it Yourself: Robots Almost Anyone Can Afford Do it Yourself: Scare Crow - For Modern Gardens - Home Project Do it Yourself: Wheelchair Works 3 Ways: Manual, R/C, and Autonomous Do it Yourself: On Line Neighborhood Watch Droid Smart Phone: Droid From Motorola :: A Robot ? Easy to Make Robot: Easy Cheap Robot Weekend Project entertainment: Home Project: MUTE TV Wearable TV Muter! FLASH Applications: How To Make A Virtual Robot in FLASH HELP: Tour This Website How To: CwhatIcanDo Website How To Build Cheap Bots: Robots Almost Anyone Can Afford How To Build Cheap Bots: How To Build a Robot in a Box How To Website: Tour This Website How To Website: CwhatIcanDo Website Infrared Proximity Sensor: Build Your Own Track Drive Robot IR Detector: Build Your Own Track Drive Robot Lighting Projects: Converting a Flashlight to LED logic analyzer: An affordable Logic Analyzer for the workbench. multi: Multi Media Messaging Device Mute the TV: Home Project: MUTE TV Wearable TV Muter! open source: An affordable Logic Analyzer for the workbench. picAxe: Build Your Own Track Drive Robot picAxe: picAxe 18m2 for robotics picAxe 08m: Robots Almost Anyone Can Afford picAxe 14m: picAxe 14m Motor Driver Board: Make Your Own picAxe 14m: How To Build a Robot in a Box picAxe 18m2: picAxe 18m2 for robotics picAxe 18m2: Weekend Project: Get Started With Robots picAxe 18m2: Build a Robot From A Power Wheelchair picAxe 18m2: Autonomous Robot Built From Power Chair Wheelchair picAxe 18m2: Wheelchair Works 3 Ways: Manual, R/C, and Autonomous picAxe 18x: How To Build a Robot in a Box picAxe 18x: picAxe 18m2 for robotics picAxe 18x: Build a Robot From A Power Wheelchair power wheelchair: Wheelchair Works 3 Ways: Manual, R/C, and Autonomous Quick Build Robot: Build a Robot In 5 Minutes RFL Robots: Building an RFL Inspired Upright Robot Base RFL Robots: RFL Robot Out Of The Box Experience robot bending: Morphibian Land Shark robot bending: Build a Robot From A Power Wheelchair Robot Man: Robot Man: With Robot Demos Robot Motor Control: Build the L298 H-Bridge Motor Control Robot Motor Control: Robot Basics Robot Motor Control: picAxe 14m Motor Driver Board: Make Your Own Robot Motor Control: Buggy Bot: Wire Frame Bot Body Robot Motor Control: picAxe 8 bit Motor Controller: Look Inside Robot Motor Control: How to build simple analog balancing robots Robot Motor Control: Build a Robot From A Power Wheelchair Robot Motor Control: Autonomous Robot Built From Power Chair Wheelchair Robot Pets: DogBot the Robo Dog : Robotic WatchDog Robot Pets: Operation of the Tri-Bot From Wowwee! Robot Pets: Robot Man: With Robot Demos robotics: Droid From Motorola :: A Robot ? robotics: Easy Cheap Robot Weekend Project Robots: BEAM BOT: HexBug Exposed! Robots: Robot Basics Robots: Buggy Bot: Wire Frame Bot Body Robots: Build a Robot In 5 Minutes Robots: Build Your Own Track Drive Robot Robots: Easy Cheap Robot Weekend Project Robots: How To Build a Robot in a Box Rumble Bot Conversions: Robots Almost Anyone Can Afford Security System: On Line Neighborhood Watch Select or type in a Keyword: Converting a Flashlight to LED track drive robot: Build Your Own Track Drive Robot Virtual Pet Robot: How To Make A Virtual Robot in FLASH web: CwhatIcanDo Website web 2.0 site: CwhatIcanDo Website web 2.0 site: CwhatIcanDo Specs: RC2 Weekend Project Robots: Easy Cheap Robot Weekend Project Weekend Project Robots: Weekend Project: Get Started With Robots |
Click To Expand / Contract Menus. View by Creator, Category, Keywords or Number of Views.